
Descrição do Projeto
Novo método de controle e design para próteses robóticas de braço que restauram sensação tátil.
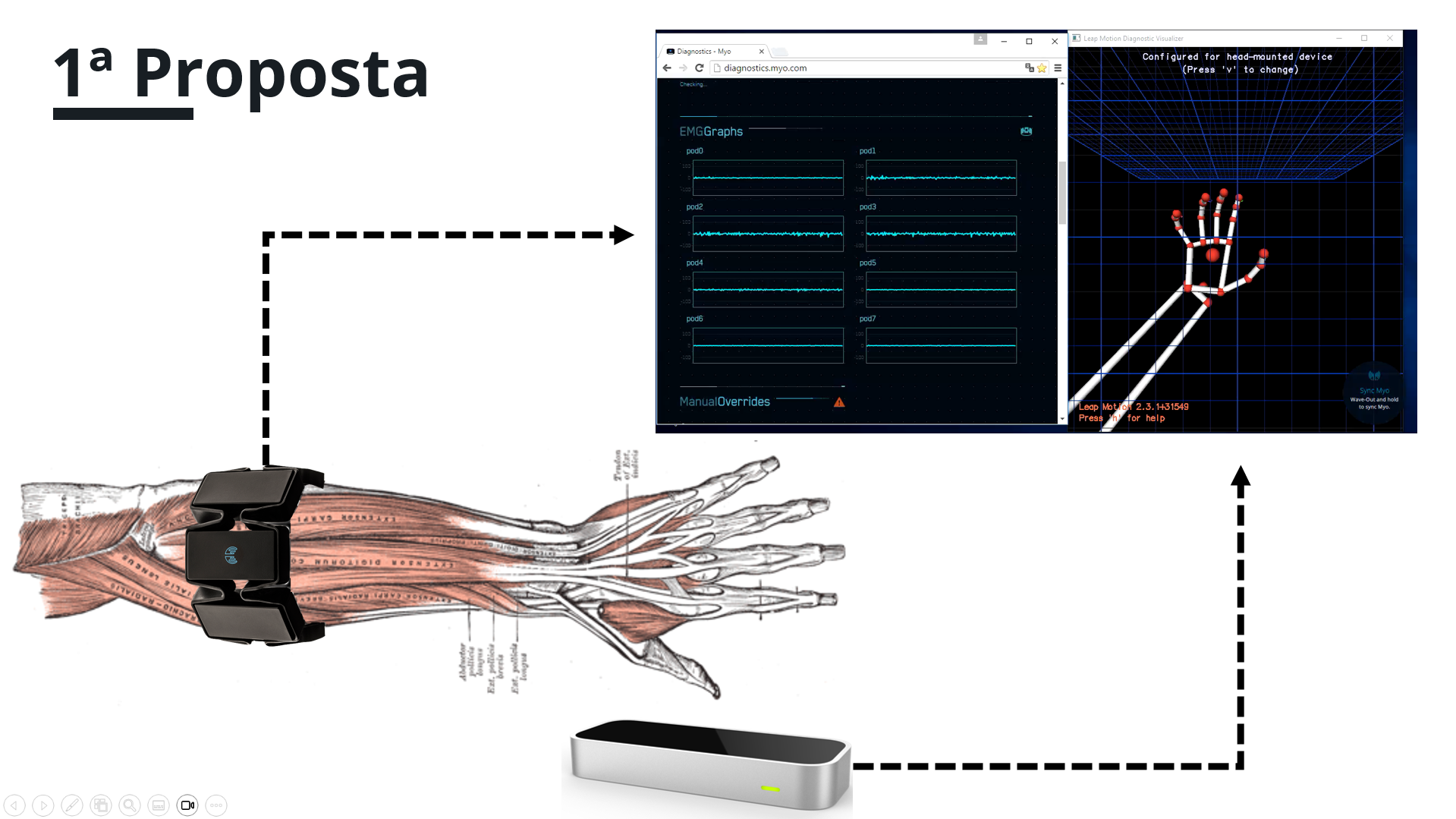
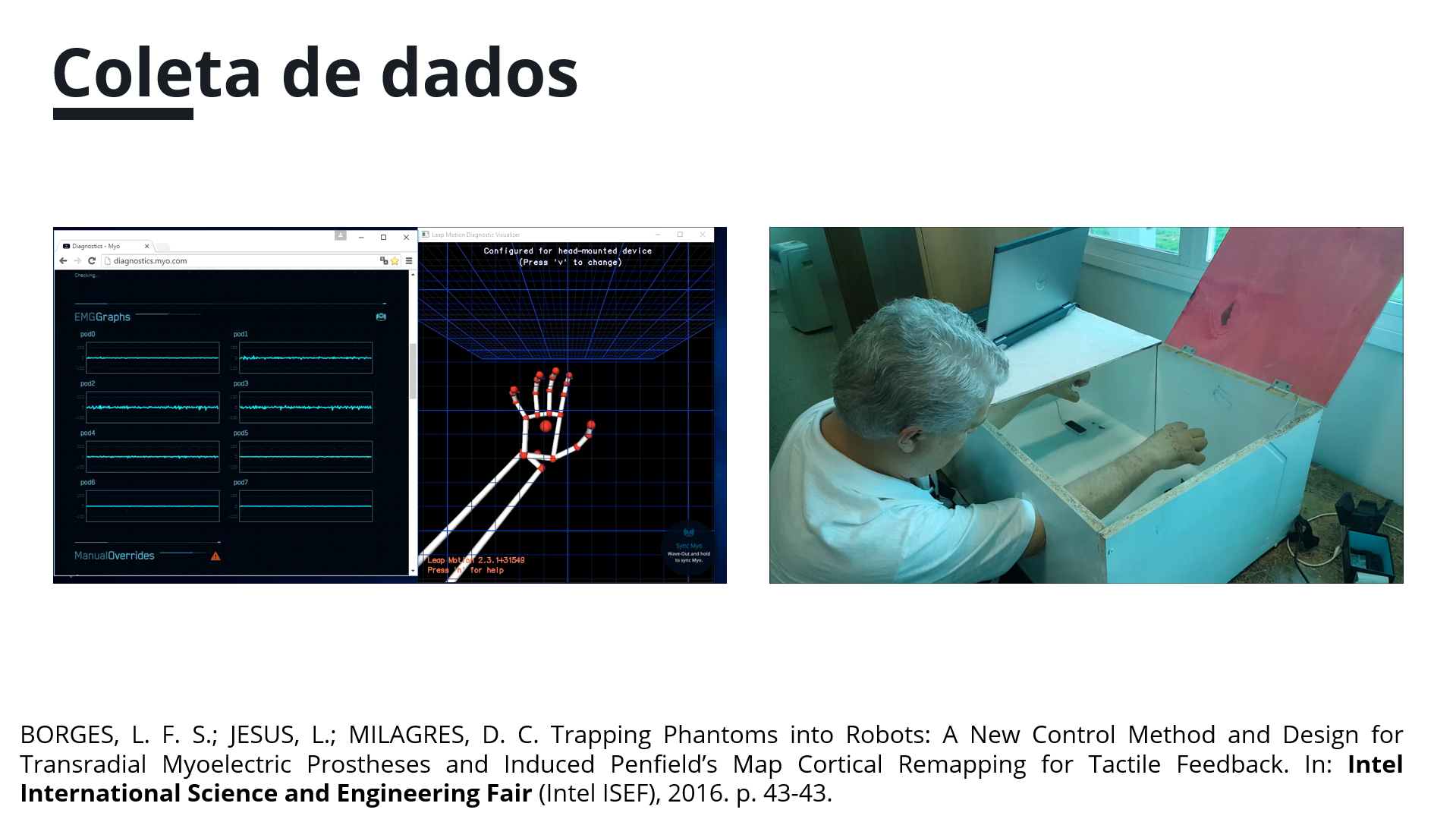
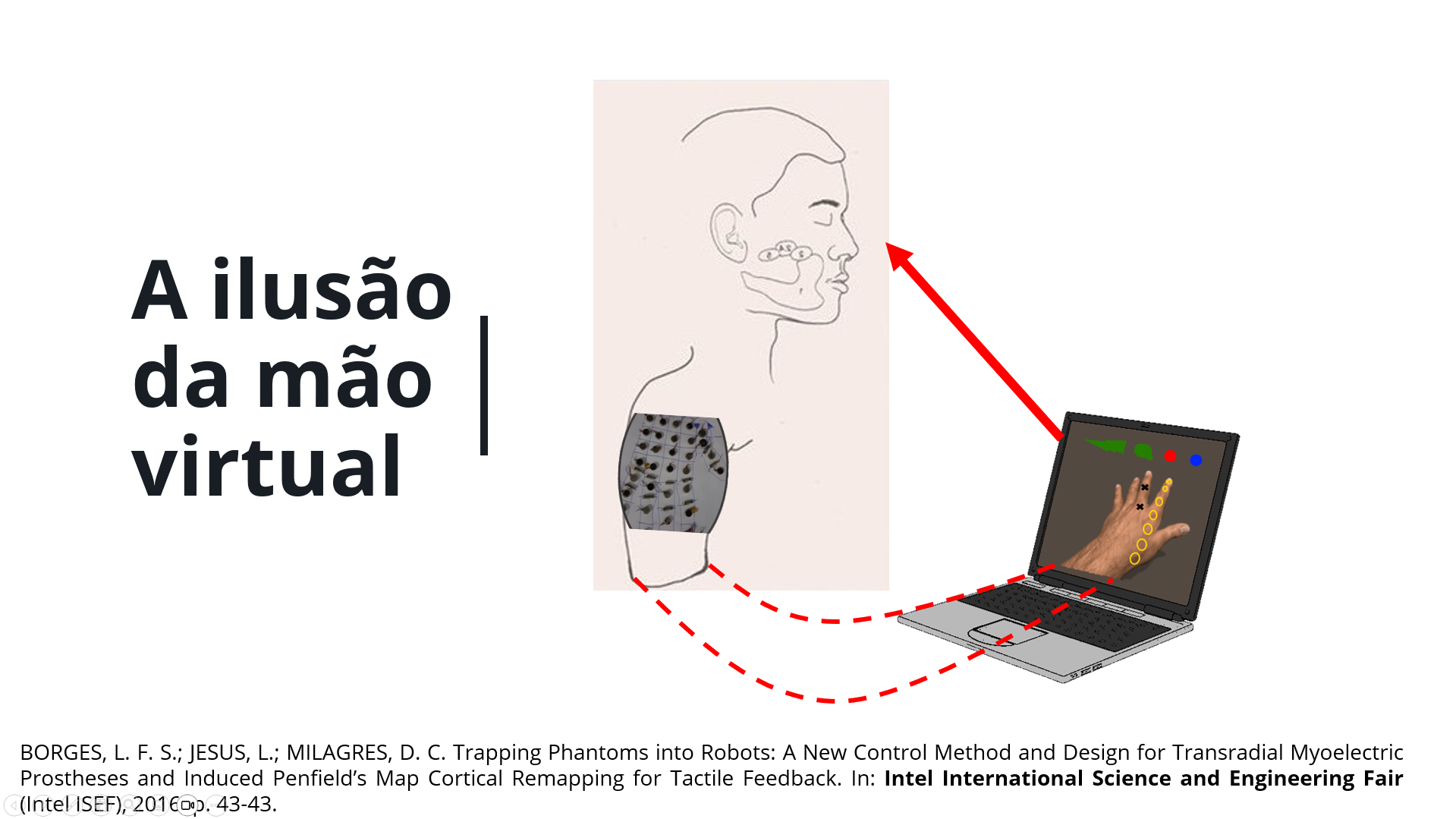
Há diversos problemas no estado da arte das próteses mioelétricas comerciais em relação as suas capacidades de mimetizar as capacidades de movimento e sentido de um membro humano natural. Isto se deve ao fato de que o método de controle utilizado neste tipo de prótese não mudou muito desde o seu estabelecimento, fazendo com que estas próteses tivessem uma alta taxa de rejeição, pois elas não comtemplam as necessidades de indivíduos com este tipo de deficiência. Para solucionar os problemas destas próteses, revisadas na literature, esta pesquisa criou um método de controle para próteses miolétricas transradiais baseado na estratégia de decodifcação continua de intenções motoras da atividade muscular do coto de uma pessoa amputada, tornando possível o controle individual e contínuo das juntas metacarpofalangeanas (MCP), proximais interfalangenas (PIP) e psulso. Este programa de controle foi utilizado para controlar uma prótese robótica transradial com atuadores individuais para controle das juntas MCP E PIP, rotação, abdução, extensão e de pulso, munida com sensores de força, temperatura, integrados com um módulo de estimulo háptico, e acelerômetro para a emulação da atuação da força gravitacional sobre as juntas e articulações. Primeiramente os voluntários foram treinados em um ambiente de realidade virtual onde controlaram um antebraço virtual com feedback tátil, para que o remapeamento cortical induzido da representação sensorial do braço fosse feito para a região do bíceps, levando em conta uma forma de membro fantasma. Uma vez estimulado, estes estímulos eram percebidos na extremidade do membro inexistente. O método de controle proposto foi capaz de estimar continuamente a posição das juntas da mão de um voluntário com amputação transradial unilateral, com um RMSE médio para as juntas de 0,12; demonstrando sua funcionalidade.


